


 Как известно в коллекторных двигателях постоянного тока коммутация обмоток в нужный момент времени осуществляется с помощью коллекторного узла(якоря). В беcколлекторных двигателях коммутацией управляет электроника. Для определения момента коммутации контроллер может использовать или датчики положения(Датчики Холла) или обратную ЭДС, генерируемую неподключенными обмотками. Датчики положения наиболее часто используются в низкооборотистых(тяговых) двигателях, где пусковой момент существенно варьируется или где требуется его высокое значение, а также где двигатель используется для позиционирования. Управление бесколлекторными двигателями без датчиков используется в тех случаях, когда пусковой момент существенно не изменяется и когда отсутствует необходимость в управлении позиционированием, как, например, в вентиляторах.
Как известно в коллекторных двигателях постоянного тока коммутация обмоток в нужный момент времени осуществляется с помощью коллекторного узла(якоря). В беcколлекторных двигателях коммутацией управляет электроника. Для определения момента коммутации контроллер может использовать или датчики положения(Датчики Холла) или обратную ЭДС, генерируемую неподключенными обмотками. Датчики положения наиболее часто используются в низкооборотистых(тяговых) двигателях, где пусковой момент существенно варьируется или где требуется его высокое значение, а также где двигатель используется для позиционирования. Управление бесколлекторными двигателями без датчиков используется в тех случаях, когда пусковой момент существенно не изменяется и когда отсутствует необходимость в управлении позиционированием, как, например, в вентиляторах.
На каждой ступени коммутации, обмотка одной фазы подключается к положительному напряжению питания, другая - к отрицательному, а третья - остается неподключенной. Обратная ЭДС неподключенной фазы в результате пересекает ноль при пересечении среднего значения положительного и отрицательного напряжений. Пересечение ноля возникает всегда в центре между двумя коммутациями. На постоянной скорости или медленно изменяющейся скорости период времени от одной коммутации до пересечения нуля и время от пересечения нуля до следующей коммутации равны. Это используется в качестве основы в данной реализации устройства управления без использования датчиков.
Для определения сигналов обратной ЭДС будем использовать метод виртуальной средней точки, для этого меряем напряжение на свободной фазе и сравниваем его со средней точкой. При использовании АЦП требуется некоторое время для преобразования, что снижает производительность, поэтому логичнее использовать аналоговые компараторы, нам ведь не нужно знать точное значение АЦП этого сигнала. Компаратор может генерировать прерывание в момент перехода напряжения через среднюю точку, а также выдавать логический сигнал своего состояния, что нам и будет нужно.
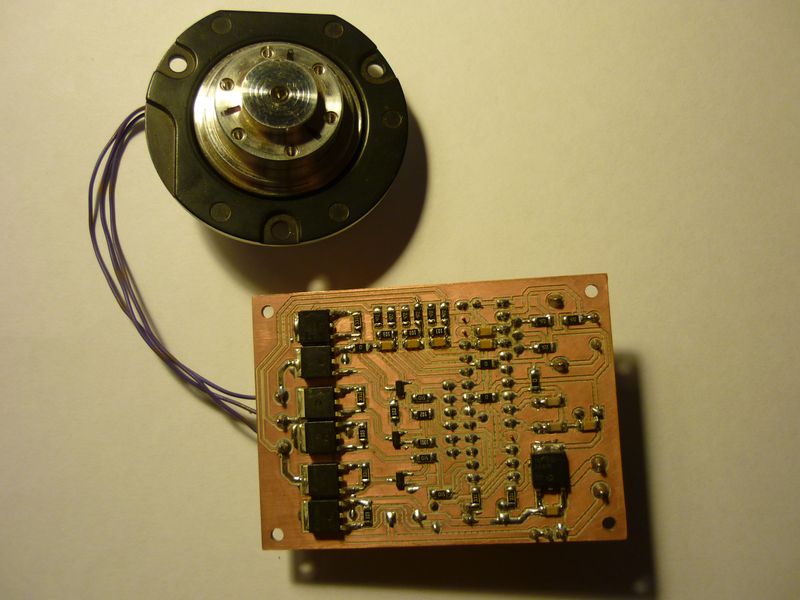
Три ШИМ-канала, OC1A, OC2 и OC1B, управляют верхними ключами(P-канальные MOSFET) мостовой схемы. Это дает возможность управления электрическим током с помощью аппаратных возможностей генерации ШИМ-сигналов при минимальном использовании программных ресурсов. В этом случае управление скоростью выполняется за счет изменения скважности ШИМ-сигнала.
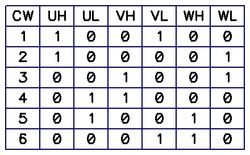
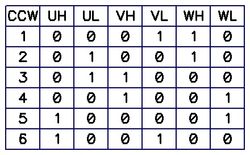
Нижние ключи управляются логическими сигналами, и в нужный момент N-канальные MOSFET подключают обмотку к минусу питания или к линии обратной ЭДС. Ниже представлены таблицы состояний сигналов подаваемых на верхние и нижние ключи, с направлением вращения по часовой и против часовой стрелки.
Биты конфигурации микроконтроллера
 |
 |
Код программы с подробными комментариями:
// Подключение бесколлекторного двигателя к AVR(ATmega8, без датчиков)
#include <avr/interrupt.h>
#include <avr/io.h>
#include <util/delay.h>
// Фаза U(Верхнее плечо)
#define UH_ON TCCR1A |= (1 << COM1A1);
#define UH_OFF TCCR1A &= ~(1 << COM1A1);
// Фаза U(Нижнее плечо)
#define UL_ON PORTB |= (1 << PB5);
#define UL_OFF PORTB &= ~(1 << PB5);
// Фаза V(Верхнее плечо)
#define VH_ON TCCR2 |= (1 << COM21);
#define VH_OFF TCCR2 &= ~(1 << COM21);
// Фаза V(Нижнее плечо)
#define VL_ON PORTB |= (1 << PB0);
#define VL_OFF PORTB &= ~(1 << PB0);
// Фаза W(Верхнее плечо)
#define WH_ON TCCR1A |= (1 << COM1B1);
#define WH_OFF TCCR1A &= ~(1 << COM1B1);
// Фаза W(Нижнее плечо)
#define WL_ON PORTB |= (1 << PB4);
#define WL_OFF PORTB &= ~(1 << PB4);
#define PHASE_ALL_OFF UH_OFF;UL_OFF;VH_OFF;VL_OFF;WH_OFF;WL_OFF;
#define SENSE_U ADMUX = 0; // Вход обратной ЭДС фазы U
#define SENSE_V ADMUX = 1; // Вход обратной ЭДС фазы V
#define SENSE_W ADMUX = 2; // Вход обратной ЭДС фазы W
#define SENSE_UVW (ACSR&(1 << ACO)) // Выход компаратора
#define START_PWM 10 // Минимальный ШИМ при запуске
#define WORK_PWM 100 // Рабочий уровень ШИМ
char start_stop = 0;
volatile unsigned char motor_pwm = WORK_PWM;
volatile unsigned char commutation_step = 0;
volatile unsigned char rotor_run = 0; // Счетчик импульсов обратной ЭДС
// Крутим по часовой стрелке
void commutation(unsigned char startup)
{
switch (commutation_step)
{
case (0):
if(!SENSE_UVW || startup)
{
WH_OFF; // Фаза W отключена
UH_ON; // На фазе U - ШИМ
SENSE_W; // Активируем вход фазы W
commutation_step = 1; // Следующий шаг
TCNT0 = 0; // Обнуляем счетчик T0
}
break;
case (1):
if(SENSE_UVW || startup)
{
VL_OFF; // На фазе V - лог. 0
WL_ON; // На Фазе W - лог. 1
SENSE_V; // Активируем вход фазы V
commutation_step = 2;
TCNT0 = 0; // Обнуляем счетчик T0
}
break;
case (2):
if(!SENSE_UVW || startup)
{
UH_OFF; // Фаза U отключена
VH_ON; // На фазе V - ШИМ
SENSE_U; // Активируем вход фазы U
commutation_step = 3;
TCNT0 = 0; // Обнуляем счетчик T0
}
break;
case (3):
if(SENSE_UVW || startup)
{
WL_OFF; // На Фаза W - лог. 0
UL_ON; // На фазе U - лог. 1
SENSE_W; // Активируем вход фазы W
commutation_step = 4;
TCNT0 = 0; // Обнуляем счетчик T0
}
break;
case (4):
if(!SENSE_UVW || startup)
{
VH_OFF; // Фаза V отключена
WH_ON; // На фазе W - ШИМ
SENSE_V; // Активируем вход фазы V
commutation_step = 5;
TCNT0 = 0; // Обнуляем счетчик T0
}
break;
case (5):
if(SENSE_UVW || startup)
{
UL_OFF; // На фазе U - лог. 0
VL_ON; // На Фазе V - лог. 1
SENSE_U; // Активируем вход фазы U
commutation_step = 0;
TCNT0 = 0; // Обнуляем счетчик T0
}
break;
}
}
// Обработчик прерывания по компаратору. Детектор обратной ЭДС
ISR(ANA_COMP_vect)
{
rotor_run++; // инкрементируем импульсы
if(rotor_run > 200) rotor_run = 200;
if(rotor_run == 200) // Если импульсы обратной ЭДС присутствуют, крутим наполную
commutation(0);
}
// Обработчик прерывания по переполнению Т0. Работа двигателя без сигналов обратной ЭДС
ISR(TIMER0_OVF_vect)
{
commutation(1); // Если сработало прерывание, есть пропуски импульсов обратной ЭДС
rotor_run = 0; // Сбрасываем счетчик импульсов
OCR1A = START_PWM; // ШИМ минимум
OCR1B = START_PWM;
OCR2 = START_PWM;
}
// Обработчик внешнего прерывания INT0. Энкодер
ISR(INT0_vect){
_delay_us(100);
if ((PIND & ( 1 << PD2)) == 0){
_delay_us(100);
// Крутим против часовой стрелки
if ((PIND & ( 1 << PD1)) == 0)
{
if(motor_pwm != START_PWM) motor_pwm -= 5; // Уменьшаем ШИМ
}
// Крутим по часовой стрелке
else
{
if(motor_pwm != 255) motor_pwm += 5; // Увеличиваем ШИМ
}
}
GIFR = (1 << INTF0); // Сбрасываем флаг внешнего прерывания
return;
}
int main (void)
{
// Порты ввода/вывода
DDRB = 0xFF;
PORTB = 0x00;
DDRD &= ~(1 << PD2)|(1 << PD1)|(1 << PD0);
PORTD |= (1 << PD2)|(1 << PD1)|(1 << PD0);
// T0 - для старта и работы двигателя без сигналов обратной ЭДС
TCCR0 |= (1 << CS02)|(1 << CS00); // Предделитель на 1024
TIMSK |= (1 << TOIE0); // Разрешаем прерывание по переполнению T0
// T1 и T2 ШИМ
TCCR1A |= (1 << WGM10); // Режим Fast PWM, 8-bit
TCCR1B |= (1 << CS10)|(1 << WGM12); // Без предделителя
TCCR2 |= (1 << WGM21)|(1 << WGM20)| // Режим Fast PWM
(1 << CS20); // Без предделителя
PHASE_ALL_OFF; // Выключаем все фазы
// Аналаговый компаратор
ADCSRA &= ~(1 << ADEN); // Выключаем АЦП
SFIOR |= (1 << ACME); // Отрицательный вход компаратора подключаем к выходу мультиплексора АЦП
ACSR |= (1 << ACIE); // Разрешаем прерывания от компаратора
// Внешнее прерывание(Энкодер)
MCUCR |= (1 << ISC01); // Прерывание по заднему фронту INT0(по спаду импульса)
GIFR |= (1 << INTF0); // Очищаем флаг внешнего прерывания
GICR |= (1 << INT0); // Разрешаем внешние прерывания INT0
sei(); // Глобально разрешаем прерывания
while(1)
{
if((PIND&(1 << PD0)) == 0) // Старт/Стоп
{
_delay_ms(20);
start_stop ^= 1; // Переключаем состояние
while((PIND&(1 << PD0)) == 0){}
}
if(start_stop)
{
ACSR |= (1 << ACIE); // Разрешаем прерывание от компаратора
TIMSK |= (1 << TOIE0); // Разрешаем прерывание по переполнению T0
GICR |= (1 << INT0); // Разрешаем внешние прерывания INT0
if(rotor_run == 200) // Если импульсы обратной ЭДС присутствуют, можем менять ШИМ
{
OCR1A = motor_pwm;
OCR1B = motor_pwm;
OCR2 = motor_pwm;
}
}
else
{
PHASE_ALL_OFF; // Все фазы выключены
ACSR &= ~(1 << ACIE); // Запрещаем прерывание от компаратора
TIMSK &= ~(1 << TOIE0); // Запрещаем прерывание по переполнению T0
GICR &= ~(1 << INT0); // Запрещаем внешние прерывания INT0
}
}
}
| Файлы к статье "Управление бесколлекторным двигателем постоянного тока" | |
| Описание:
Проект AVRStudio4 для ATmega8, ATmega48, макет печатной платы Diptrace |
|
| Размер файла: 36.31 KB Количество загрузок: 3 986 | Скачать |
Комментарии
В данном примере используется энкодер от автомагнитолы на 24имп/об