Подробную теоретическую информацию о шаговых двигателях можно найти на просторах интернета, а здесь займемся практическим решением. Униполярный двигатель имеет одну обмотку в каждой фазе, от середины обмотки сделан отвод. Это позволяет изменять направление магнитного поля, создаваемого обмоткой, простым переключением половинок обмотки. При этом существенно упрощается схема драйвера. Драйвер должен иметь только 4 простых ключа. Средние выводы обмоток могут быть объединены внутри двигателя, поэтому такой двигатель может иметь 5 или 6 выводов. Иногда униполярные двигатели имеют раздельные 4 обмотки, по этой причине их ошибочно называют 4-х фазными двигателями. Каждая обмотка имеет отдельные выводы, поэтому всего выводов 8. Из-за простоты подключения и управления униполярного двигателя в этой статье рассмотрим именно этот тип шагового двигателя.
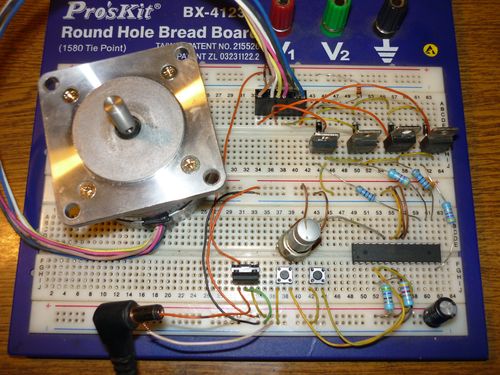
Для управления 6-выводным униполярным шаговым двигателем нужно 4 независимых управляющих элемента - транзистора VT1 - VT4. Транзисторы используются составные типа КТ829, КТ973 с защитными диодами внутри или импортные аналоги. Можно взять отдельные транзисторы, можно использовать специальную микросхему ULN2003A, которая содержит целых семь транзисторов, и кроме того, там есть еще 7 защитных диодов, которые пропускают через себя ток самоиндукции при переключении обмоток.

Управляющий контроллер Atmega8, тактируется от внутреннего генератора частотой 8МГц. В программе используем два внешних прерывания и прерывание по переполнению таймера Т0. Все прерывания определяем и настраиваем в главной функции, также настраиваем порты ввода/вывода микроконтроллера.
Для запуска двигателя в ту или иную сторону необходимо подать на его обмотки последовательность импульсов сдвинутых по фазе. Эти последовательности импульсов определим в массивах cw_dir[] и ccw_dir[], соответственно по часовой стрелке и против часовой стрелки. Указатель направления вращения status меняет свое состояние с лог.0 на лог.1 и наоборот при нажатии на одну из кнопок SB1 и SB2. Если status == 1 двигатель вращается против часовой, если status == 0 двигатель вращается по часовой стрелке. Переменная status меняет свое значение при наступлении внешних прерываний на входах INT0 и INT1. Чтобы происходило внешнее прерывание подтягиваем входы INT0 и INT1 через резисторы к плюсу питания.
Сигналы управления обмотками двигателя формируются на портах PB3 – PB0 программно. Формирование импульсных последовательностей выполняется в обработчике прерывания таймера 0. Переключение фаз происходит только при переполнении программного таймера. Переменная ovftimes определяет величину задержки между чередованиями импульсов. Ее значение связано со значением АЦП, чем больше значение АЦП тем медленнее вращается вал двигателя и наоборот. Регулировка скорости вращения осуществляется переменным резистором R8, средний вывод которого подключен к каналу ADC0. Ниже представлен код управляющей программы с подробными комментариями.
// Подключение униполярного шагового двигателя к AVR
#include <avr/io.h>
#include <util/delay.h>
#include <avr/interrupt.h>
// Полношаговый режим 2 фазы
// Направление вращения по часовой стрелке
unsigned char cw_dir[4]=
{
0b00000001,
0b00000010,
0b00000100,
0b00001000
};
// Направление вращения против часовой стрелки
unsigned char ccw_dir[4]=
{
0b00001000,
0b00000100,
0b00000010,
0b00000001
};
volatile unsigned char step_index;
volatile unsigned int ovftimes;
volatile unsigned char status;
// Прерывание по переполнению Т0
ISR(TIMER0_OVF_vect)
{
static unsigned int count = 1;
count++;
if(count >= ovftimes) // Применяем задержку
{
cli(); // Запрещаем прерывания
if(status) // если status == 1 крутим против часовой
PORTB = ccw_dir[step_index++];
else // иначе крутим по часовой
PORTB = cw_dir[step_index++];
if (step_index >= 4)
step_index=0;
count = 0; // Сброс счетчика
TCNT0 = 0; // Старт счетчика с нуля
sei(); // Глобально разрешаем прерывания
}
}
// прерывание по вектору INT0
ISR(INT0_vect)
{
status = 0; // по часовой
}
// прерывание по вектору INT1
ISR(INT1_vect)
{
status = 1; // против часовой
}
int main(void)
{
DDRB = 0b00001111; // PB0, PB1, PB2, PB3 - выходы
PORTB = 0x00; // Лог. нули на выходе
ADCSRA = (1 << ADEN) // разрешение АЦП
| (1 << ADPS2) // предделитель на 64 (частота АЦП 125kHz)
| (1 << ADPS1);
ADMUX = 0x00; // ADC0 - вход, внешний ИОН 5 Вольт
GICR |= (1 << INT1)|(1 << INT0); // Разрешаем внешние прерывания
MCUCR |= (1 << ISC11) // Прерывание по заднему фронту INT1
|(1 << ISC01); // Прерывание по заднему фронту INT0
TCCR0 |= (1 << CS01); // Предделитель на 8
TCNT0 = 0; // Старт счетчика с нуля
TIMSK |= (1 << TOIE0); // Разрешаем прерывания по переполнению Т0
step_index = 0;
ovftimes = 10; // первоначальная задержка
status = 0; // при включении вращение по часовой
sei(); // Глобально разрешаем прерывания
while(1)
{
ADCSRA |= (1 << ADSC); // Начинаем преобразование
while (ADCSRA & (1 << ADSC)); // Ждем пока завершится преобразование
ovftimes = ADCW; // Значение временной задержки
}
}
Обсуждение статьи на форуме
Комментарии
Вот осциллограмма на стоке транзистора такая и должна быть?