В этой статье представлен драйвер для 4х-проводных шаговых двигателей, который можно использовать при создании систем автоматизации или игрушек. Помимо несложной схемы, устройство характеризуется рядом полезных функциональных возможностей.
Основные параметры:
- биполярное (4х-проводное) управление шаговым двигателем;
- шаговый или полушаговый режим;
- потенциометр для плавной регулировки скорости вращения;
- возможность выбора режима остановки: с торможением или без него;
- электропитание: 7...24В постоянного тока.
- нагрузочная способность: до 0,6 А/канал (катушка).
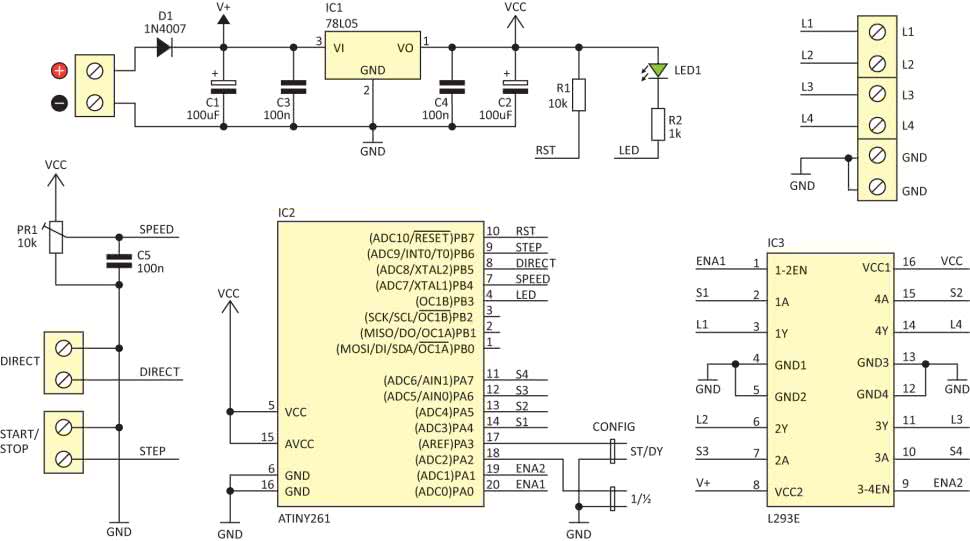
Рисунок 1. Принципиальная схема драйвера шагового двигателя
Принципиальная схема контроллера представлена на рисунке 1. Система должна питаться постоянным напряжением 7...24 В, подключенным к разъему Х1. Диод D1 защищает систему от подключения с неправильной полярностью, а конденсаторы C1…C4 действуют как фильтр питания. Напряжение питания подается на стабилизатор IC1 типа 78L05, который обеспечивает необходимое напряжение +5 В для микроконтроллера. Работой устройства управляет микроконтроллер IC2 (ATtiny261), тактируемый внутренним тактовым сигналом. Исполнительный каскад был построен с использованием драйвера L293D. Потенциометр PR1 используется для регулировки скорости вращения. Диод LED1 показывает рабочее состояние системы. Клеммы Direct и Start/Stop используются соответственно для управления выбором направления вращения и торможением двигателя. Перемычки CONFIG используются для настройки работы контроллера:
Перемычка «1/½» используется для выбора режима работы двигателя. Перемычка отсутствует - пошаговый режим. Перемычка установлена - полушаговый режим. Шаговый режим - простейший способ управления шаговым двигателем, полушаговый режим - добавление промежуточных состояний в последовательность управления, на практике он обеспечивает более плавную работу двигателя, но увеличивает потребляемый ток примерно на 50...60 %.
Перемычка ST/DY используется для выбора метода остановки двигателя. Перемычка отсутствует - статическая остановка. Перемычка установлена - динамическая остановка. При остановке двигателя сигналом на разъеме STOP/START, с настройкой на динамическую, выход контроллера сохраняет состояние с момента остановки, т.е. включаются соответствующие катушки двигателя, на практике это приводит к тому, что ось двигателя блокируется в одной точке, но вызывает потребление значительного тока и нагрев обмоток. Статическая остановка приводит к отключению двигателя в остановленном состоянии, на практике это вызывает почти свободное движение оси двигателя, и система потребляет лишь небольшой ток покоя.

Рисунок 2. Плата драйвера шагового двигателя
Контроллер мотора должен быть собран на плате, схема сборки которой показана на рисунке 2. Сборка системы типовая и не должна вызывать затруднений. Происходит это стандартно, начиная с самых мелких элементов и заканчивая самыми крупными. После сборки система сразу готова к работе. Все изменения в конфигурации контроллера, сделанные с помощью перемычек CONFIG, будут активны только после выключения и повторного включения питания. Способ подключения системы с типичным биполярным двигателем показан на рисунке 3.

Рисунок 3. Подключение платы драйвера
| Файлы к статье "Драйвер биполярного шагового двигателя на ATtiny261" | |
| Описание:
Файл прошивки микроконтроллера |
|
| Размер файла: 53.4 KB Количество загрузок: 62 | Скачать |